|
|

|

|
| e-Pub |
Section: New Results
Human Centered Navigation in the physical world
Social Mapping
Participants : Panagiotis Papadakis, Anne Spalanzani, Christian Laugier.
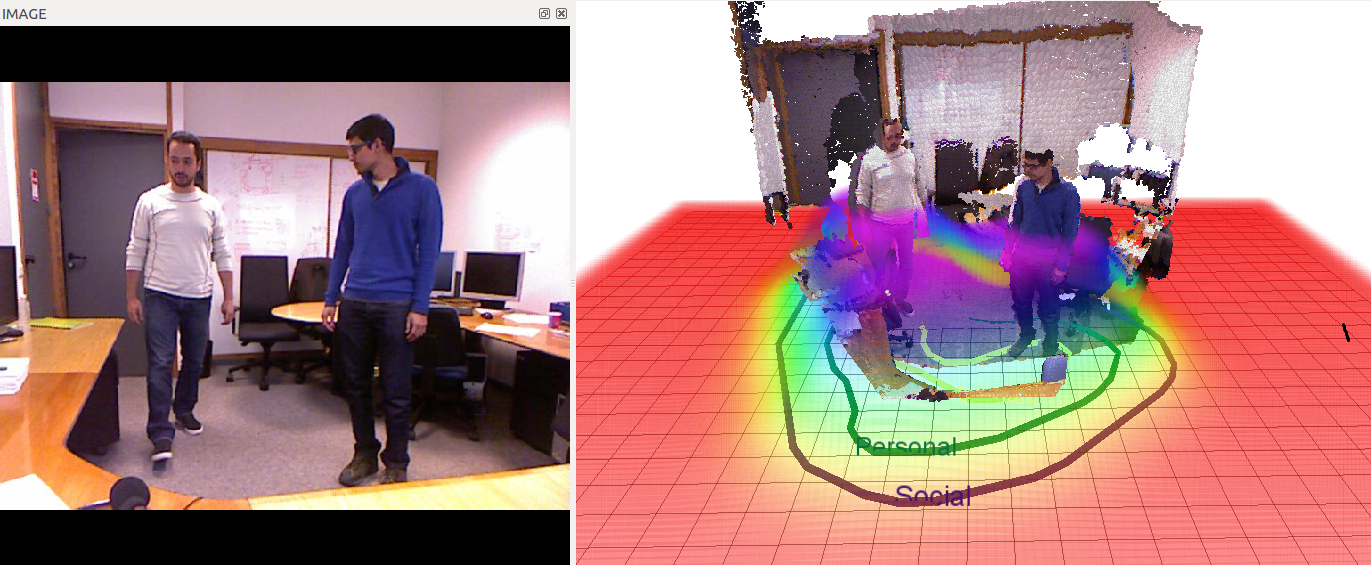
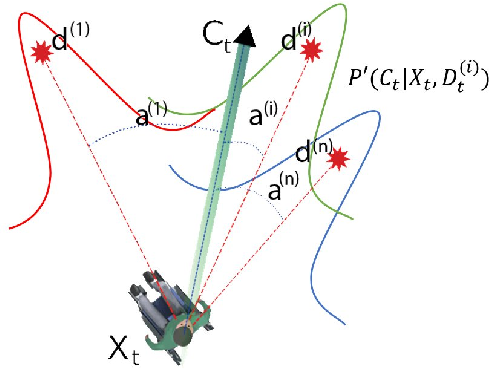
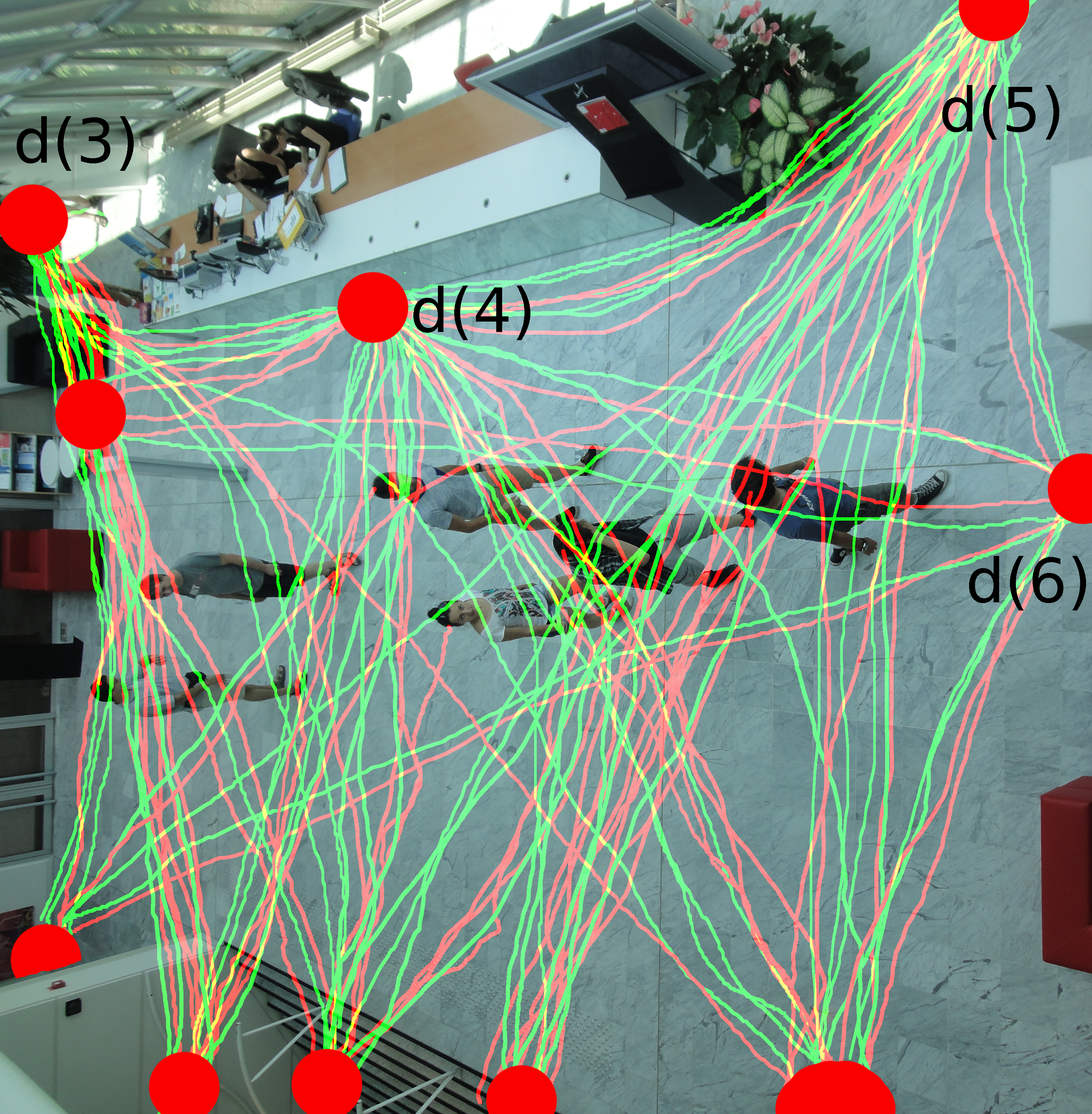
With robots technology shifting towards entering human populated environments, the need for augmented perceptual robotic skills emerges that complement to human presence. In this integration, perception and adaptation to the implicit human social conventions plays a fundamental role. Toward this goal, we introduce a novel methodology to detect and analyse complex spatial interactions of multiple people and encode them in the form of a social map, whose structure is obtained by computing a latent space representation of human proxemic behaviour. We accomplish this by appointing to humans distinct, skew-normal density functions that quantify social sensitivity and by using them in the sequel to induce a training set for regressing a collective density function of social sensitivity (see fig. 10 ). Finally, we extract level-sets of constant social sensitivity levels within the social map by which we can effectively and efficiently analyse individual as well as shared interaction zones of varying shape and size. Extensive experiments on human interaction scenarios demonstrate the feasibility and utility of the proposed approach in diverse conditions and promote its application to social mapping of human-populated environments. This work was published at IROS [23] and submitted to RAS journal.
|
Goal oriented risk based navigation in dynamic uncertain environment
Participants : Anne Spalanzani, Jorge Rios-Martinez, Arturo Escobedo-Cabello, Procopio Silveira-Stein, Gregoire Vignon, Alejandro Dizan Vasquez Govea, Christian Laugier.
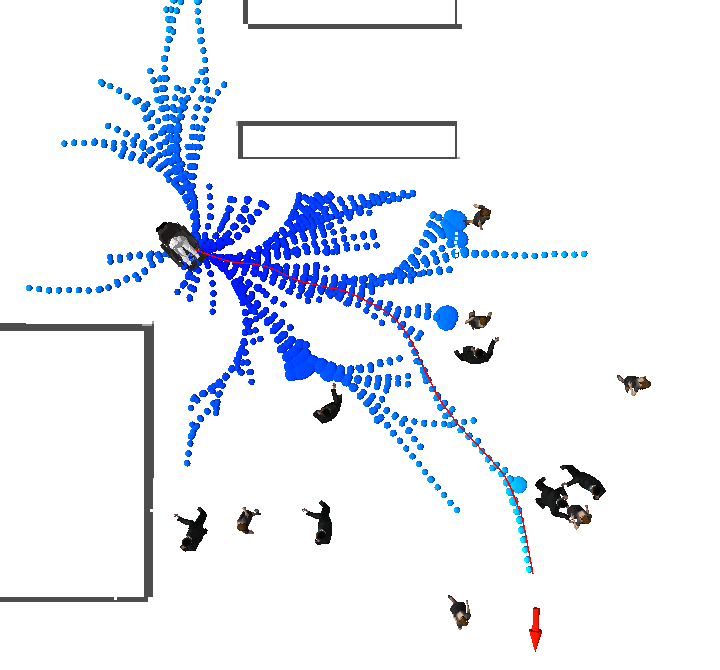
Navigation in large dynamic spaces has been adressed often using deterministic representations, fast updating and reactive avoidance strategies. However, probabilistic representations are much more informative and their use in mapping and prediction methods improves the quality of obtained results. Since 2008 we have proposed a new concept to integrate a probabilistic collision risk function linking planning and navigation methods with the perception and the prediction of the dynamic environments [36] . Moving obstacles are supposed to move along typical motion patterns represented by Gaussian Processes or Growing HMM. The likelihood of the obstacles' future trajectory and the probability of occupation are used to compute the risk of collision. The proposed planning algorithm, call RiskRRT (see Figure 11 for an illustration), is a sampling-based partial planner guided by the risk of collision. Results concerning this work were published in [37] [38] [39] . [47] and [48] . In 2013, Jorge Rios defended his phD on this topic. We obtained an Inria ADT to optimize and share the RiskRRT algorithm.
Navigation Taking Advantage of Moving Agents
Participants : Procopio Silveira-Stein, Anne Spalanzani, Christian Laugier.
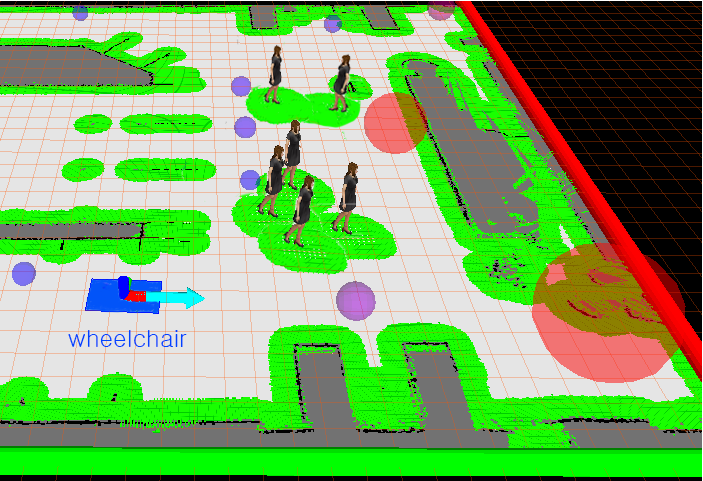
In this work, we proposes a different form of robotic navigation in dynamic environments, where the robot takes advantage of the motion of pedestrians, in order to improve its own navigation capabilities. The main idea is that, instead of treating persons as dynamic obstacles that should be avoided, they should be treated as special agents with an expert knowledge of navigating in dynamic scenarios. To benefit from the motion of pedestrians, this work proposes that the robot select and follow them, so it can move along optimal paths, deviate from undetected obstacles, improve navigation in densely populated areas and increase its acceptance by other humans. To accomplish this proposition, novel approaches are developed in the area of leader selection, where two methods are explored. The first uses motion prediction approaches while the second uses a machine learning method, to evaluate the leader quality of subjects, which is trained with real examples. Finally, the leader selection methods are integrated with motion planning algorithms and experiments are conducted in order to validate the proposed techniques. One of the most relevant application is navigation among crowds. Figure 12 illustrates the concept.
|

The work is published in [25] [24] and Procopio Stein defended his phD the 11th of december 2013 at the Aveiro University (phD co-directed by Anne Spalanzani and Vitor Santos).
Autonomous Wheelchair for Elders Assistance
Participants : Arturo Escobedo-Cabello, Gregoire Vignon, Anne Spalanzani, Christian Laugier.
The aging of world's population is bringing the need to provide robotic platforms capable to assist elder people to move [46] . It is necessary that such transportation is reliable, safe and comfortable. People with motor disabilities and elders are expected to benefit from new developments in the field of autonomous navigation robotics.
Autonomously driven wheelchairs are a real need for those patients who lack the strength or skills to drive a normal electric wheelchair. The services provided by this kind of robots can also be used to provide a service of comfort, assisting the user to perform difficult tasks as traversing a door, driving in a narrow corridor etc.
Simple improvements of the classical powered wheelchair can often diminish several difficulties while driving. This idea of comfort has emerged as a design goal in autonomous navigation systems, designers are becoming more aware of the importance of the user when scheming solution algorithms. This is particularly important when designing services or devices intended to assist people with some disability. In order for the robot to have a correct understanding of the intention of the user (when moving around) it is necessary to create a model of the user that takes into account his habits, type of disability and environmental information. The ongoing research project is centered in the understanding of the intentions of the user while driving an autonomous wheelchair, so that we can use this information to make this task easier.
During the last two years the work was centered in the improvement of the usability of the system. A review of the state of the art in user's intention estimation algorithms was made and a new model to infer the intentions of the user in a known environment was presented [34] , [35] .
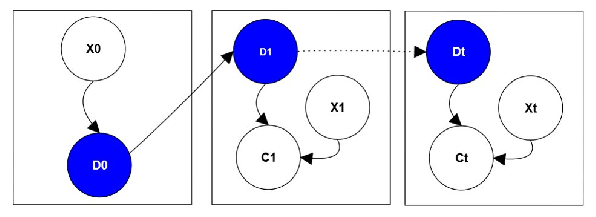
The algorithm models the intention of the user as 2D topological goals in the environment. Those places are selected according to how frequently they are visited by the user (user habits). The system was designed so that the user can give orders to the wheelchair by using any type of interface, as long as he can show the direction of the intended movement (joystick, head tracking, brain control, etc). As shown in figure13 , the chosen approach uses a Dynamic Bayesian Network to model and infer the intentions. The main contribution of this work is to model the intention of the user as topological goals instead of normal trajectory-based methods, therefore the model is simpler to deal with.
|

In 2013 the results of the user intention destination method were published in the IROS conference [16] . The presented work covered the following aspects:
User Intention Estimation: Two different methods to drive the wheelchair were compared, a semi-autonomous and a manual mode. In semi-autonomous mode the user’s intention is estimated from the position of the face and the wheelchair takes care of all the planning to arrive there while avoiding obstacles. In manual mode the wheelchair is driven using the face without assistance from the robotic controller.
The Bayesian estimator shown in Fig.13 was used to do the inference of the desired destination of the user in semi-autonomous mode. The user’s intention was modeled as a set of destinations commonly visited by the user and the task consisted in finding the destination targeted by the user.
Interfaces: People with motor disabilities and elders often have problems using joysticks and other standard control devices. Under this consideration our experimental platform was equipped with different types of user-interfaces to provide a multi-modal functionality as described in [35] . A face pose interface allows to control the wheelchair's motion by changing the face direction, while voice recognition interface is used to guarantee an adequate control of the wheelchair for those commands that otherwise would be difficult to give by only using the face (Stop, start, etc). This exploitation of more natural and easy-to-use human machine interfaces was one of the main contributions of the work presented in [16] .
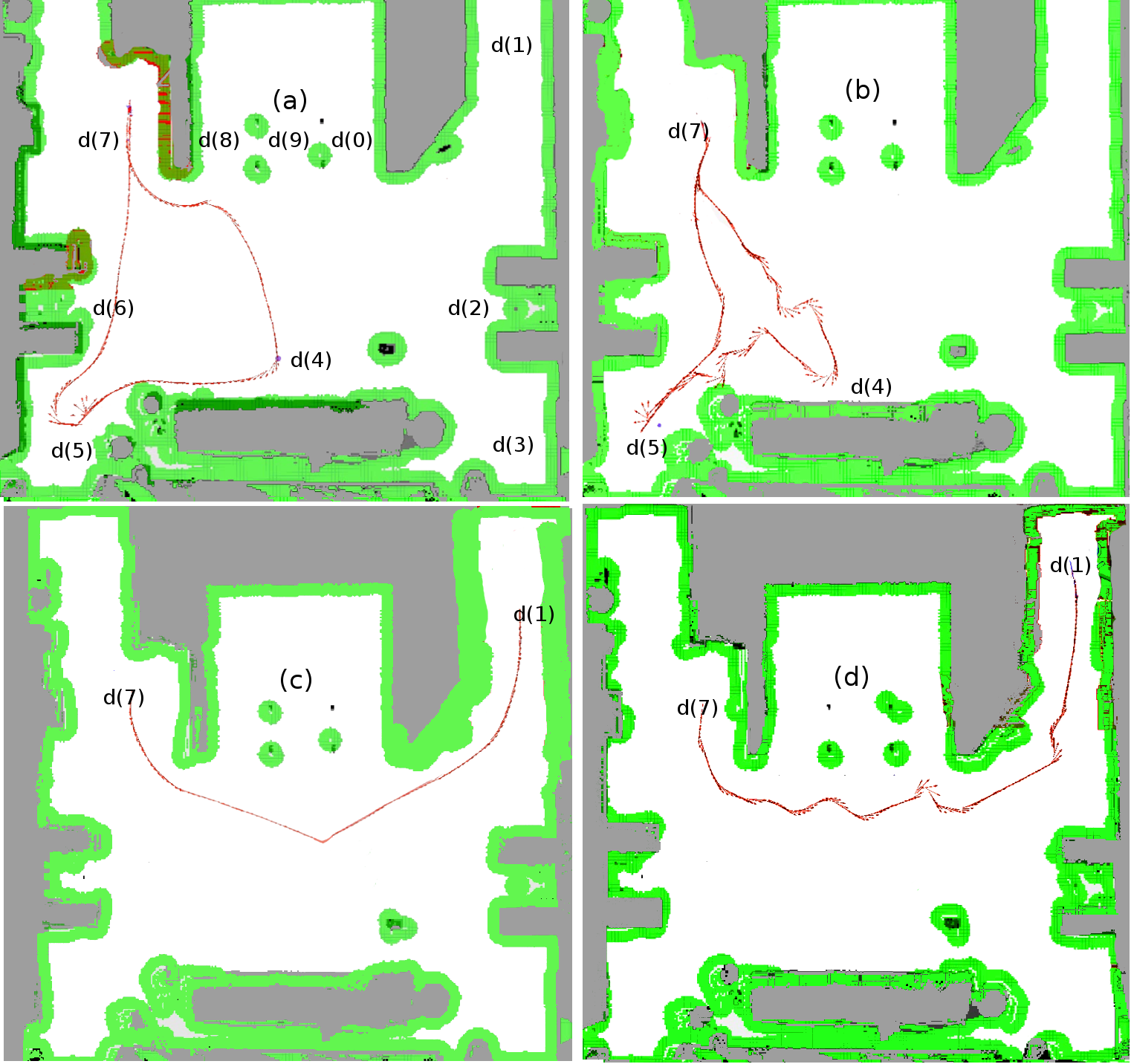
Experimental evaluation: Experiments were done in the hall of the Inria Rhône-Alpes laboratory. People in the scene were tracked to detect the most visited destinations in this setting (red circles). Those typical destinations were then placed in the map used by the robotic wheelchair. Each destination has a probability value related to the number of times that it is visited by people. The extracted typical destinations and related probabilities are used as prior knowledge when inferring the user’s desired destination. In Fig.14 (Right) the spheres represent the typical destinations placed in the internal map o the wheelchair and the size of the sphere represents the probability of being the desired destination of the user in the wheelchair given it's position in the map and direction of the face (blue arrow).
To evaluate the performance of the method different persons were asked to drive the wheelchair in both “manual” and “semi-autonomous” mode. The trajectories of followed by the wheelchair were recorded and evaluated in [16] , In Fig.15 one sample of those trajectories is presented where it can be appreciated how those trajectories executed with assistance of the robot are considerably softer than those obtained in manual mode as explained in [16] .
Human aware navigation: Current work is being done in the construction of a social cost-map that is able to work with different open source path planning algorithms. This plug-in was developed using the method presented by Rios in [45] .
|
|
Bayesian modelling to implement and compare different theories of speech communication
Participants : Raphael Laurent, Pierre Bessière, Julien Diard, Jean-Luc Schwartz.
A central issue in speech science concerns the nature of representations and processes involved in communication. The search for phoneme or syllable specific invariants led to three major sets of approaches: motor, auditory and perceptuo-motor theories. They have been widely argued for and against, but the theoretical debate appears to be stagnating. It is our belief that computationnal models designed within a rigorous mathematical framework may allow to put forward new arguments to support either theory, and new ideas for experiments to be carried out on human subjects.
We have designed an integrative Bayesian model which allows to study auditory, motor and perceptuo-motor aspects of speech production and perception. This model was tested on perception tasks on evaluation corpora with more and more variability compared to the learning corpus. This showed a really high robustness of the purely motor model, which contained more information that it is the case in practise, due to unrealistic learning methods. The work was then focused on more realistic learning algorithms, where speech motor gestures are unsupervisedly learned through imitation, by generating motor gestures trying to reach auditory targets, and memorising the acoustics corresponding to these motor commands. This work was published in 2013 [19] . Raphael Laurent defended his phD in 2013.
Bayesian computing
Participants : Emmanuel Mazer, Pierre Bessière.
A book and the compagnon software on bayesian programming have been released this year :
The book “Bayesian Programming” is available at http://www.crcpress.com/product/isbn/9781439880326 and the associated software at http://www.probayes.com/fr/Bayesian-Programming-Book/
Features
Presents a new modeling methodology and inference algorithms for Bayesian programming Explains how to build efficient Bayesian models Addresses controversies, historical notes, epistemological debates, and tricky technical questions in a dedicated chapter separate from the main text Encourages further research on new programming languages and specialized hardware for computing large-scale Bayesian inference problems Offers an online Python package for running and modifying the Python program examples in the book
Summary
Probability as an Alternative to Boolean Logic While logic is the mathematical foundation of rational reasoning and the fundamental principle of computing, it is restricted to problems where information is both complete and certain. However, many real-world problems, from financial investments to email filtering, are incomplete or uncertain in nature. Probability theory and Bayesian computing together provide an alternative framework to deal with incomplete and uncertain data.
Decision-Making Tools and Methods for Incomplete and Uncertain Data
Emphasizing probability as an alternative to Boolean logic, Bayesian Programming covers new methods to build probabilistic programs for real-world applications. Written by the team who designed and implemented an efficient probabilistic inference engine to interpret Bayesian programs, the book offers many Python examples that are also available on a supplementary website together with an interpreter that allows readers to experiment with this new approach to programming.
Principles and Modeling
Only requiring a basic foundation in mathematics, the first two parts of the book present a new methodology for building subjective probabilistic models. The authors introduce the principles of Bayesian programming and discuss good practices for probabilistic modeling. Numerous simple examples highlight the application of Bayesian modeling in different fields.
Formalism and Algorithms
The third part synthesizes existing work on Bayesian inference algorithms since an efficient Bayesian inference engine is needed to automate the probabilistic calculus in Bayesian programs. Many bibliographic references are included for readers who would like more details on the formalism of Bayesian programming, the main probabilistic models, general purpose algorithms for Bayesian inference, and learning problems.
FAQs Along with a glossary, the fourth part contains answers to frequently asked questions. The authors compare Bayesian programming and possibility theories, discuss the computational complexity of Bayesian inference, cover the irreducibility of incompleteness, and address the subjectivist versus objectivist epistemology of probability.
The First Steps toward a Bayesian Computer A new modeling methodology, new inference algorithms, new programming languages, and new hardware are all needed to create a complete Bayesian computing framework. Focusing on the methodology and algorithms, this book describes the first steps toward reaching that goal. It encourages readers to explore emerging areas, such as bio-inspired computing, and develop new programming languages and hardware architectures.